

Introduction
Satellites make outstanding contributions to the military, political, and economic power of states, especially in surveillance, reconnaissance, offensive, and defence missions.1 In addition, the extensive coverage and broad-spectrum capabilities of satellites are also valuable for the civilian sector for human migration monitoring, meteorology, forestry, and agriculture.2 Besides their low-cost development and zero risk to human life, satellites also have the advantage of providing photogrammetry services beyond the capabilities of manned aircraft.
Today, as technology advances at an ever-increasing rate, miniaturization brings forward the possibility of using smaller satellites and, consequently, reducing space missions’ launch, engineering, and construction costs.
When examining the use of a single large satellite versus a cluster of smaller satellites, in terms of cost-effectiveness in performing complex space missions, it is worth considering the set-up cost. Set-up costs are one of the biggest portions of the overall cost of satellite development and considering the required number of ground stations and installations it is more economically viable to perform a mission with a large satellite. A small-satellite cluster will become increasingly economical after the initial set-up, considering the multitude of uninterrupted missions that can be conducted with space and ground systems backing each other up.
Whether micro, nano, or pico, small satellites have unique properties such as relative lightweight, low cost, and rapid production. For these reasons, small satellites are gaining widespread reach and are constantly fielding new capabilities. They are used for various purposes, such as communication or remote sensing;3 however, due to their constraining features, e.g. limited mass, volume, power, and payload, some space missions have to be carried out using constellation formations rather than a single satellite.
In general, the lifespan of the cluster’s satellites, which are designed without a propulsion system, varies according to the orbital parameters. The service life of a satellite cluster operating at 400 km in Low Earth Orbit (LEO), under the effects of outer-orbital perturbations4 and without orbit corrections, is on the order of months, whereas for a similar cluster at 700 km in LEO is on the order of years. For this reason, the mission requirements and service life must be established from design and the architecture must be created to operate at the optimum orbital altitude.
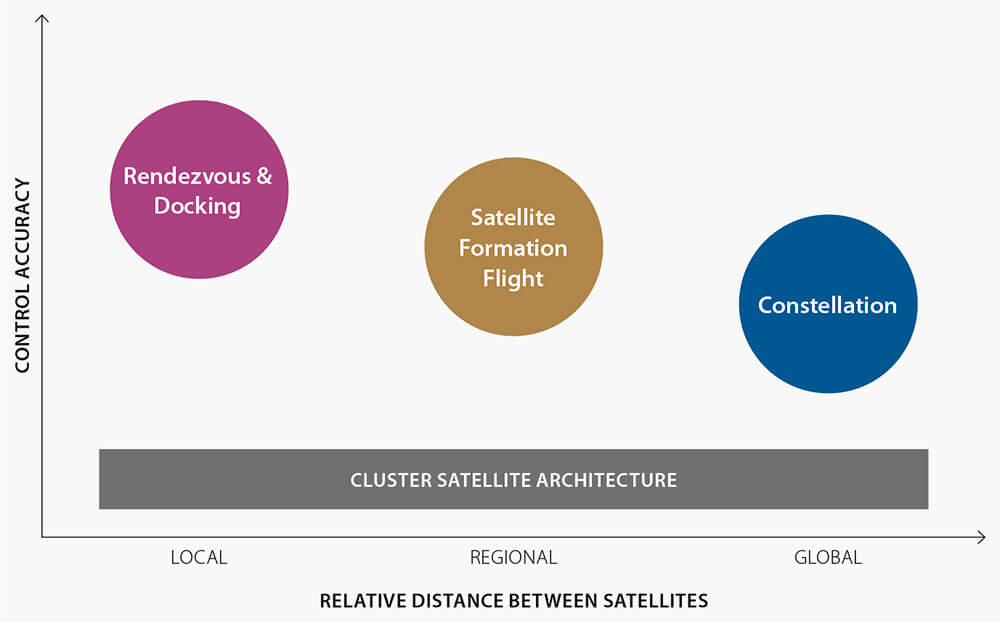
Figure 1: Cluster space systems according to the relative distance and control sensitivity. © Copyrighted
A satellite cluster can undertake complex space missions such as rendezvous, formation flight, or stereo imaging. In addition, a recent development includes its use in delivering full-range internet services. Their increased presence in LEO will naturally increase the risk of orbital collisions.
Recently, NATO’s sensitivity to supporting operations with small satellites in LEO has increased.5 Throughout NATO, work continues to train personnel in Space matters and establish dedicated, compatible Space organizations.
Recognizing the increased importance of small-satellite cluster architectures, their study and research has become a top priority for international communities, such as NATO, as well as for most nations.6 The progress brought in by research is accelerating Space Power’s impact ushering real effects at the tactical, operational, and strategic levels. Space Power will enhance any country’s armed forces and the overall strategic effectiveness of NATO and all its stakeholders.7
Pros and Cons
The advantages satellite clusters provide include a greater field of view and coverage as opposed to a single satellite, while three-dimensional earth observation and interferometry studies can also be undertaken.
In a satellite cluster, each component is smaller, lighter, and easier to construct; hence, the cluster satellite concept is less costly and less complex than a single large satellite. Moreover, the failure of a single satellite is not as critical to the overall mission, because the failed satellite can be easily replaced by a spare.
Some constraints and challenges for the cluster satellite concept, such as operational and environmental complexities, mission performance particularities, and interoperability issues, are largely due to the diversity of its autonomous systems and sensors.8
Most important in cluster satellites applications is to design the formation architecture according to user and space mission requirements. Each satellite’s motion parameters and relative geometry disturbances must be precisely determined during in-flight formation.9 In addition, the use of high-performance, visual sensor-based systems makes it possible to capture the motions of spacecraft and space debris and predict their relative vector states, which can subsequently be used for rendezvous, docking,10 or navigation to determine orbital motion and avoid collision.11
Control of Cluster Geometry
Cluster satellite architectures are generally subdivided by distance and control precision. Flight formation is a specific subset of distributed space systems, distinguished by interspace and control precision. There is a diversity of formation architectures from local satellite formation systems, with ten metres between satellites, to global architectures spaced up to thousands of kilometres.12
The main cluster satellite architectures, represented in Figure 1, can be defined as:13
- Constellation architecture: comprised of many satellites flying in similar orbits, properly distributed in time and position to ensure the desired ground coverage. The satellites are controlled individually from ground control stations. A real-life example is the Global Positioning System (GPS) constellation architecture in LEO.
- Satellite formation flight architecture: A mission- and observation-oriented multi-satellite architecture with relative position controlled by closed-loop internal control systems. It is generally used for shorter separation distances, unlike the constellation architecture.
- Rendezvous & docking architecture: is the most sensitive in terms of control accuracy and distance between space platforms. The control sensitivity increases proportionally with the decrease in the relative distance between space platforms.
It is important to determine the geometric shape of the cluster architecture and the number of satellites required. Once the formation is achieved, differential perturbation accelerations will gradually destroy the initial geometry. Depending on users’ needs, the active control of the formation’s relative geometry is a requirement to counter orbital distortions, particularly within LEO.
A relative Guidance, Navigation, and Control (GNC) system should be used to maintain the formation for the desired period. Typically, a closed-loop control scheme is implemented on the satellites, as shown in Figure 2. Guidance information is provided by ground stations or by autonomous internal sensors of other satellites within the cluster.
Relative navigation is concerned with optimum estimates of the position and speed of a platform relative to another.14 There are many traditional applications, such as Global Navigation Satellite System (GNSS) and Inertial Navigation System (INS), either integrated or ground based. These applications require extra connectivity between components and the sensor fusion sections.15 The newer applications use optical and image processing, as well as sensing and tracking models, which aim to reduce complexity and increase accuracy.
Operating Considerations
The following examples present some of the operating challenges when dealing with small-satellite systems.16
Determination of attitude and position. Using miniature sensors to interpret a satellite’s position, interpret measurements, and determine the relative distance between satellites with sufficient accuracy.
Autonomous control of position and attitude. The deviation between the measured position and the attitude towards a target will be determined to establish the corresponding corrective manoeuvres. There is limited contact with the ground control stations due to the orbit’s nature; hence, real-time reaction capabilities must be utilized.
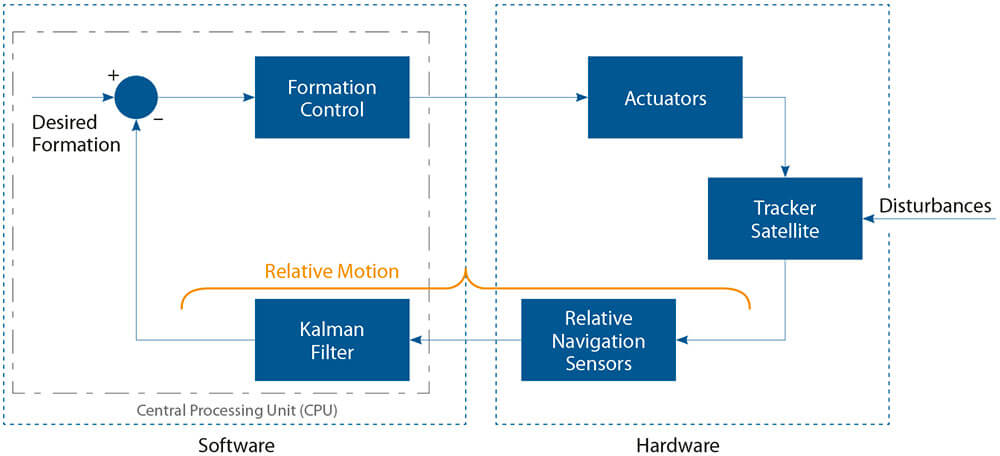
Figure 2: Closed-loop control scheme of follower satellite. © Copyrighted
Operation of cluster satellites architectures. Control of satellite formations requires coordination of ground control interactions, which are characterized by signal propagation delays and disconnections, and built-in autonomous reaction capabilities. It is sufficient to implement the position-control function capability only for a leading satellite and the follower satellites will adjust their positions to the leader accordingly to the desired constellation geometry.
Small satellites may use different methods for their relative navigation while in formation flight. Traditionally, GNSS & INS integration is used to find the relative position.17 Without data from the ground or the GNSS, the satellite will have to navigate using only on-board calculation data, usually accomplished by internal sensors.18
Cluster satellites architecture with GNSS-based sensors. These small satellites use GNSS signals to maintain the cluster’s geometry by determining their positions relative to each other. This method is in use and has been proven in many cluster satellite space missions. Still, due to the limited GNSS coverage, only satellites in LEO use this traditional method of relative navigation.
Cluster satellites architecture with vision-based sensors. Visual-based sensor systems are preferred to reduce dependency on external systems.19 While GNSS is used for close-formation satellites in LEO or Medium Earth Orbit (MEO), it cannot be used in ‘deep space’ missions. New sensor technologies must be developed to reduce costs and payload weight while avoiding the performance limits of the GNSS.
Relative navigation algorithms. To control the tracker satellite, its relative state is estimated using algorithms that observe and predict its movements, such as the monocular Simultaneous Localization and Mapping (SLAM) algorithms,20 Kalman filters,21 Gaussian Sum,22 and Particle Filters.23
Results and Discussion
Paramount to choosing a cluster satellite architecture is satellite miniaturization, thus avoiding the restrictive limitations of single-satellite space missions and saving launch and construction costs. A comparison between single satellite architectures and cluster satellite systems is shown in Table 1.
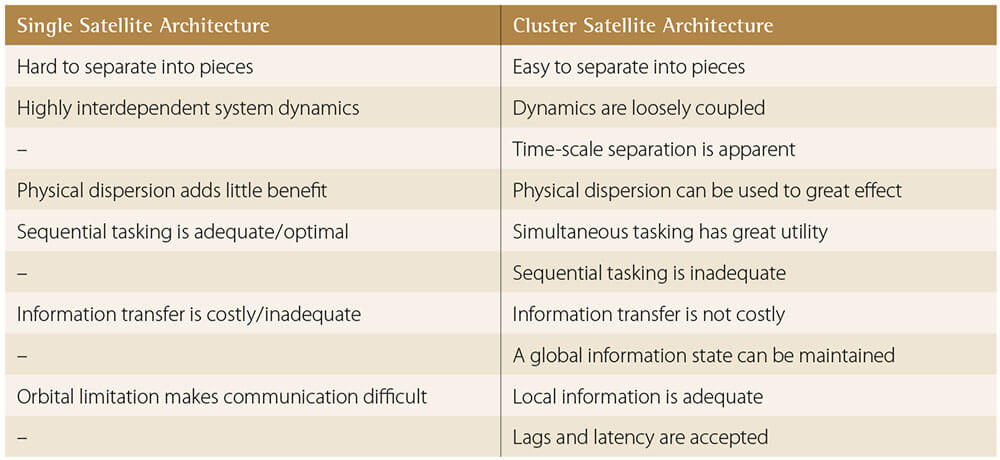
Table 1: Comparison of single and multiple satellite architectures.24
GNSS-based and visual-based sensors are the two main approaches used to estimate the relative vectors of cluster satellites. A comparison between them is shown in Table 2.
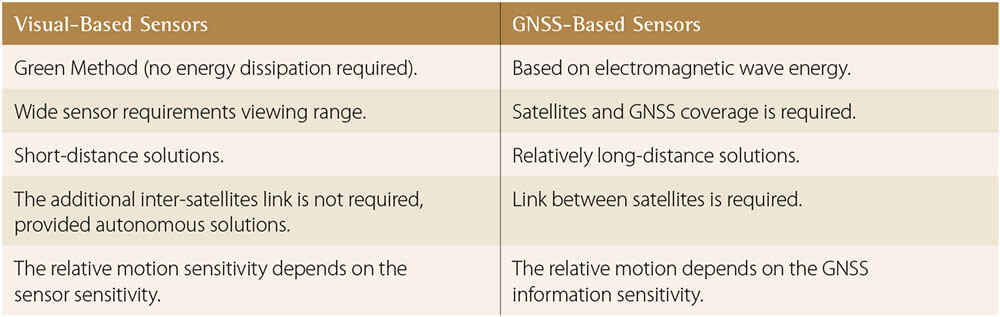
Table 2: Comparison of visual- and GNSS-based sensors within cluster architectures.25
The traditional approaches, which use GNSS sensors, have proven their reliability and sensitivity in LEO space missions. Technological developments have made it possible to use visual sensors to counter the coverage limitations of GNSS; hence, their usage is expected to increase in future space assets.
Conclusion
Cluster satellite architectures have become a necessity, rather than a choice, in terms of space mission requirements and cost-effectiveness. In addition, to secure their place in space, many nations are developing space architectures that are broadly inclusive, cost-effective, and interoperable with other nations’ space assets.
Furthermore, the challenges of realizing a cluster satellite architecture can be overcome through a combination of high-corporate experience, knowledgeable manpower, and technological capabilities. Economic considerations and the need for competent personnel should motivate countries to work in concert to develop cluster satellite architectural formations. NATO stands out as the most suitable community to foster interoperability. Considering that cluster architectures will continue to increase in the future, it is necessary to emphasize the development of new sensors and utility payloads.
Today, when private companies create their own cluster satellite architectures and space forces, NATO creates a Space Force entirely reliant on allies’ space systems. Considering the space and earth-based operational environment requirements and the inherent operational advantages of each, it may be time for NATO to enhance its organic space architecture by acquiring and operating its own assets and support operations in all domains for all its forces and components.
Other issues that need to be addressed globally are space security and satellite collision risks. The risk of a collision, resulting from the uncontrolled use of Space, is increased by the growing number of satellites operated by civilian companies and organizations. Global organizations, such as NATO, should acknowledge the intensive use of Space and take the necessary measures to minimize the risks associated with the uncontrolled use of Space.
NATO has to continuously adapt to keep up with the developing technologies in the Space domain. Within the scope of space missions, these small, dynamic, and cost-effective cluster satellite architectures will inevitably replace the single, large satellites. The question is, when will NATO embrace this challenge and work to maintain its technological advantage in Space?









